Navigating city streets
We’ve taught our cars to navigate through many complicated scenarios on city streets.
Our cars use their sensors and software to sense objects like pedestrians, cyclists, vehicles and more, and are designed to safely drive around them.
How it drives
Like any driver, a self-driving car needs to constantly answer these questions.
Where am I?
The car processes both map and sensor information to determine where it is in the world. Our car knows what street it's on and which lane it's in.
What’s around me?
Sensors help detect objects all around us. The software classifies objects based on their size, shape and movement pattern. It detects a cyclist and a pedestrian in this case.

What will happen next?
The software predicts what all the objects around us might do next. It predicts that the cyclist will ride by and the pedestrian will cross the street.
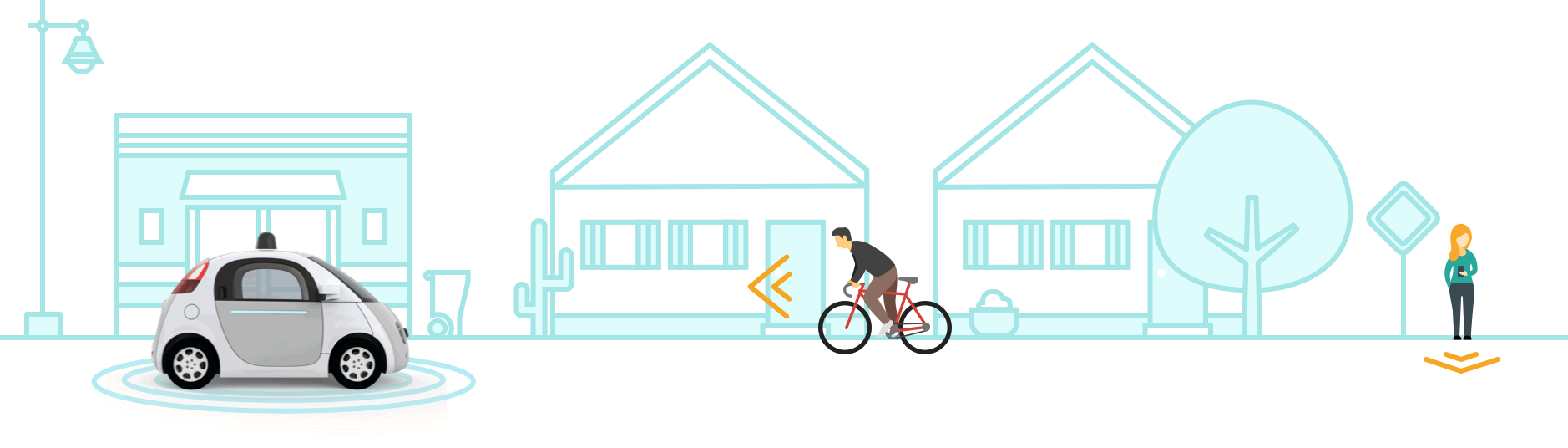
What should I do?
The software then chooses a safe speed and trajectory for the car. Our car nudges away from the cyclist, then slows down to yield to the pedestrian.

What’s in a self-driving car
Our self-driving prototypes rely on their sensors and software to drive themselves.
We’re working toward vehicles that take you where you want to go at the push of a button. We started by adding components to existing cars like our Lexus SUVs, then began designing a new prototype from the ground up to better explore what should go into a fully self-driving vehicle. We removed the steering wheel and pedals, and instead designed a prototype that lets the software and sensors handle the driving.

-
Sensors
Lasers, radars and cameras detect objects in all directions
-
Interior
Designed for riding, not for driving
-
Electric batteries
To power the vehicle
-
Rounded shape
Maximizes sensor field of view
-
Computer
Designed specifically for self-driving
-
Back-up systems
For steering, braking, computing and more